warning Critical OS Concept
What is a Deadlock?
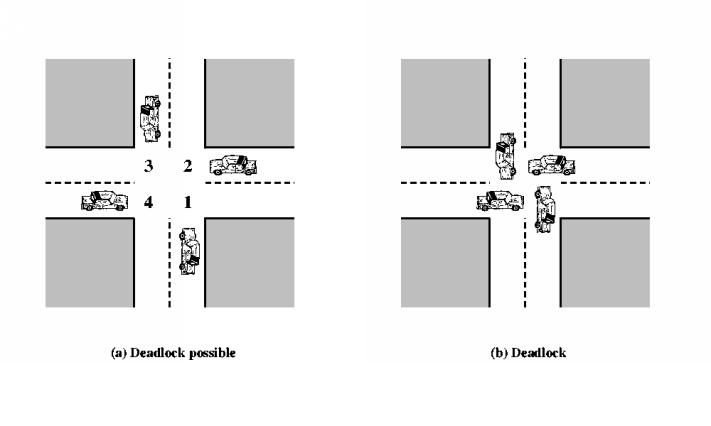
In technical terms, a deadlock is a situation in concurrent computing where two or more processes are blocked forever because they are waiting for each other to release a resource.
Imagine Process A holds Key 1 and needs Key 2, while Process B holds Key 2 and needs Key 1. Neither can proceed.

Source: Wikimedia Commons